


Automated Driving in Mixed Traffic Conditions — CARISSMA
Autonomous driving research & systems engineering

Autonomous Driving in Mixed Traffic Environments
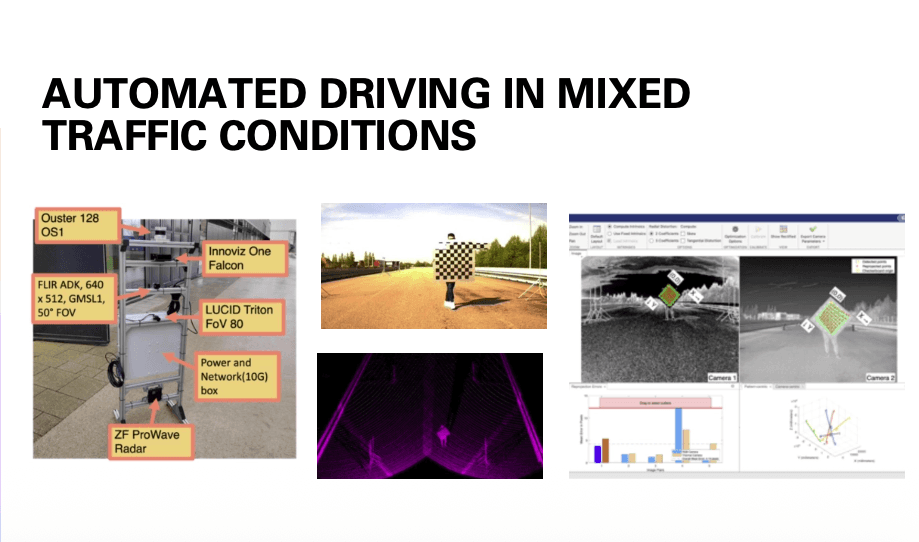
This research project focused on automated driving systems operating in mixed traffic conditions, where autonomous vehicles interact with human-driven vehicles, pedestrians, and complex urban dynamics. The work addressed perception, decision-making, system integration, and validation challenges in real-world heterogeneous traffic environments.
The project combined simulation, system modeling, and real-world experimentation to evaluate autonomous behavior in complex and unpredictable traffic scenarios. Engineering focus was placed on robustness, safety, and system reliability in mixed-traffic interactions.
Timeline
Academic Research Project

Service
Autonomous Driving
Research & Simulation
Research Architecture & System Development
The project focused on system-level architecture for autonomous driving in mixed environments, integrating perception, planning, and control components into a unified framework. Simulation-based testing and scenario modeling were used to validate system behavior before real-world experimentation.
Research activities emphasized safe interaction between autonomous and human-driven systems, focusing on predictability, decision logic, and operational stability.
Research Impact
This project contributed to advancing understanding of autonomous vehicle behavior in mixed traffic conditions, supporting future development of safe, scalable, and deployable automated driving systems. The work strengthened foundations for research, validation methodologies, and system-level design in autonomous mobility.